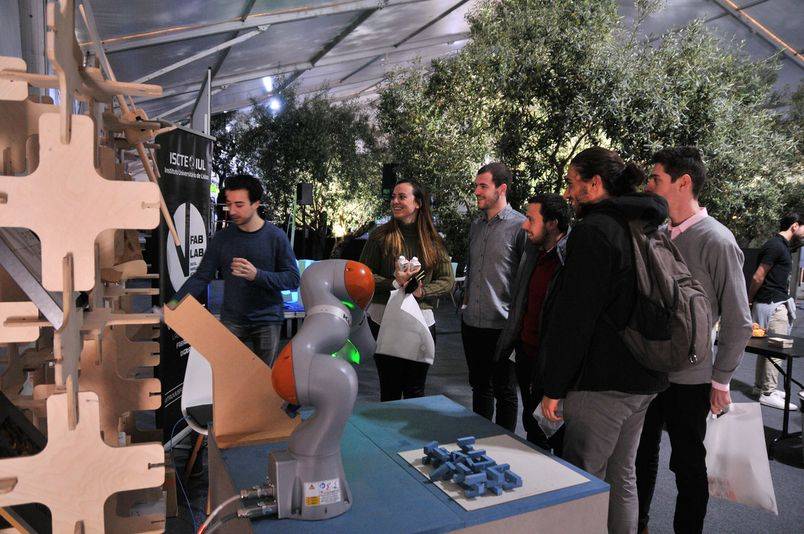
Demonstração | FISTA 2019
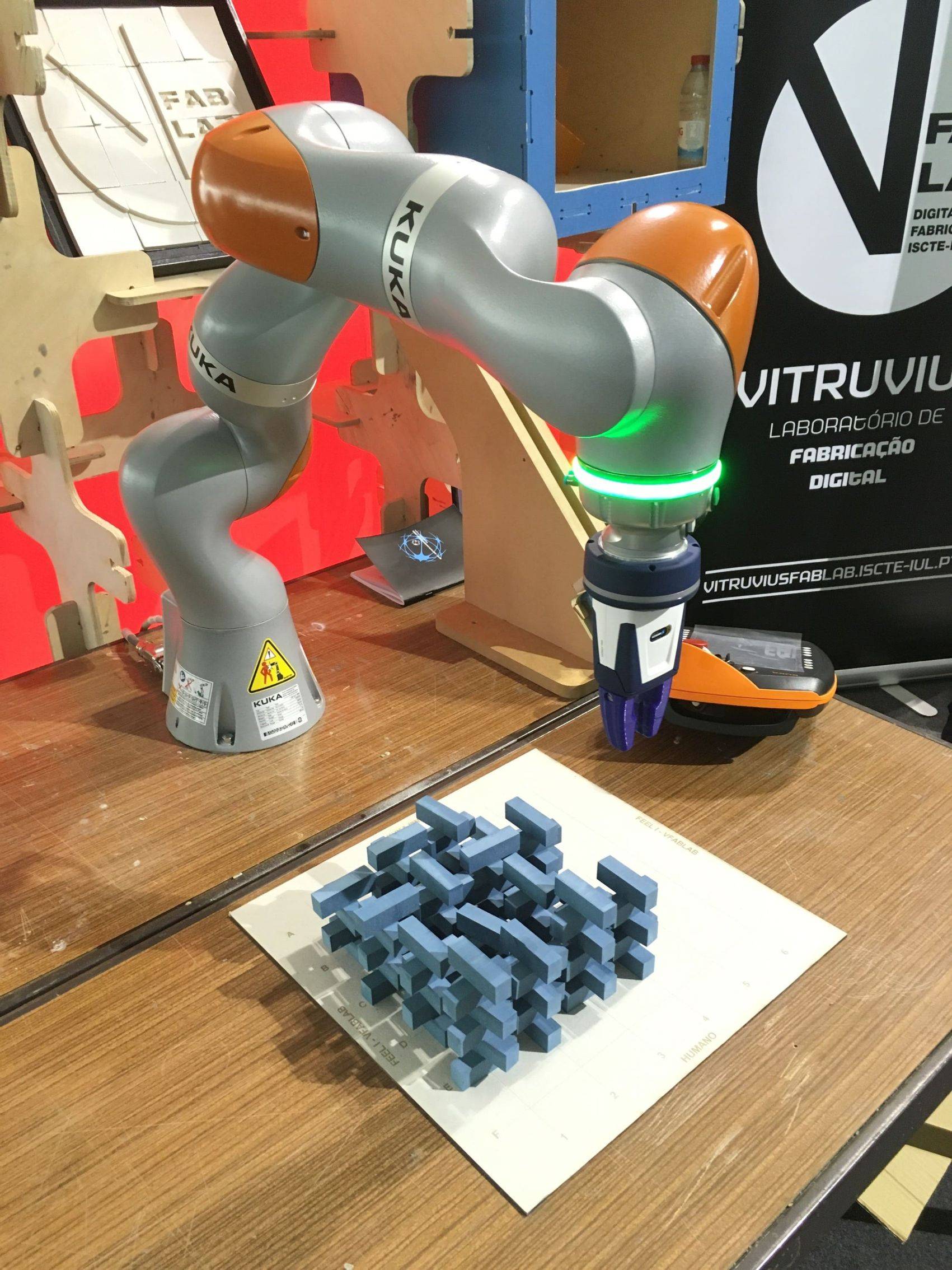
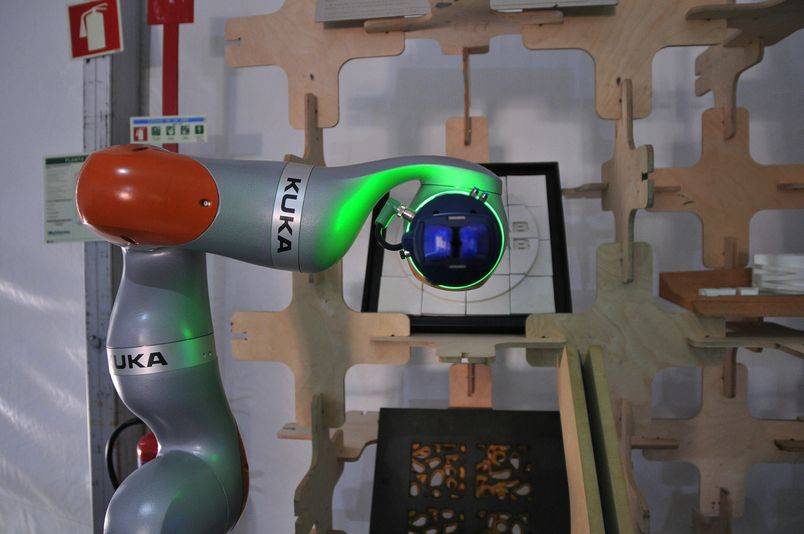
KUKA IIWA é um braço robótico colaborativo de última geração. Possui
sensores que lhe permitem identificar colisões e reagir a alterações no seu contexto usando os seus sensores.
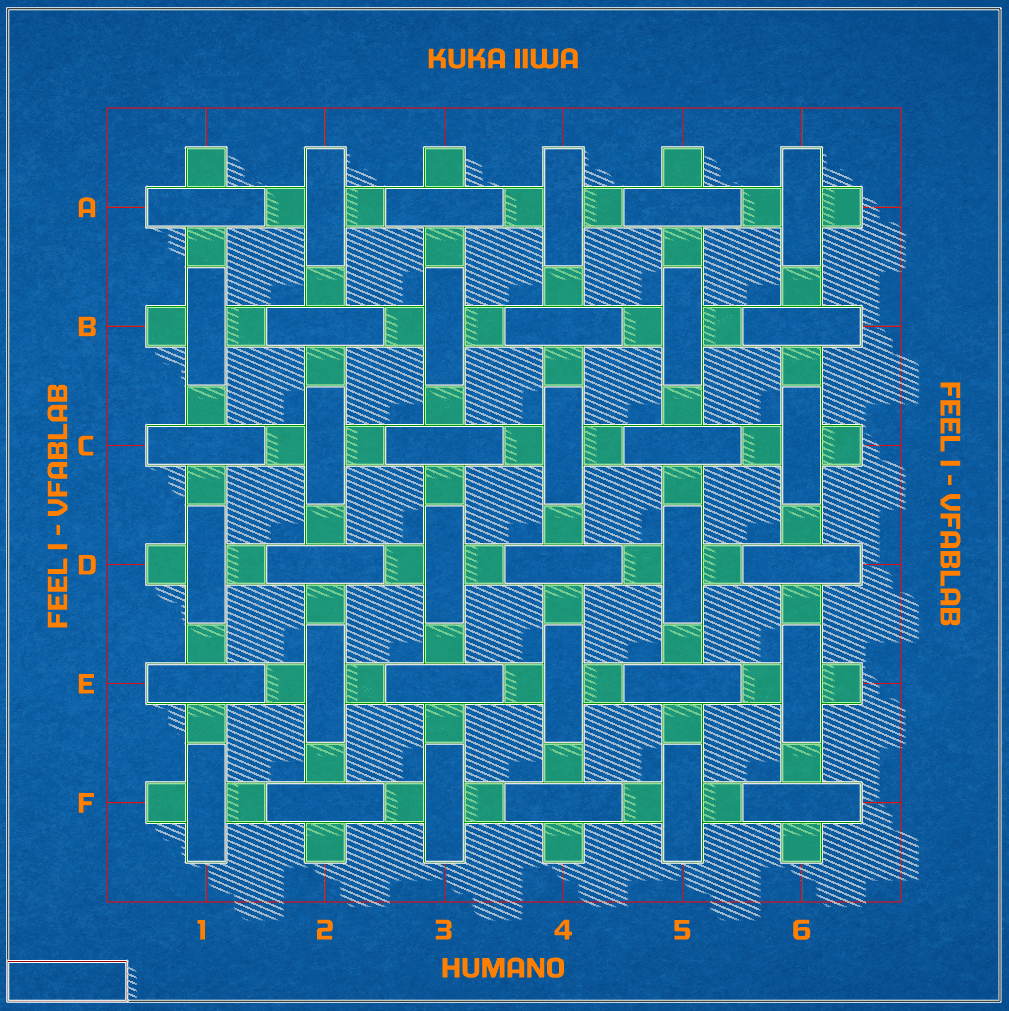
FEEL I é inspirado pela peça SEEK (Architecture Machine Group, 1970) e explora a sensibilidade da KUKA IIWA como forma de reação ao contexto. FEEL I é demonstração interativa de montagem de uma matriz de blocos: Se a máquina detetar alterações na posição dos blocos, coloca o bloco numa posição nova, corrigindo a rotação:
Se o encontrar um bloco antes do que era suposto, coloca o novo bloco na nova posição e corrige a sua rotação respeitando a matriz. Se ao colocar o novo bloco não encontrar suporte procura o próximo bloco para colocar sobre esse a nova peça
Autoria _ VFABLAB, Filipe Brandão (ISCTE-IUL, ISTAR-IUL), João Sousa (ISCTE-IUL)
Tecnologia _ Kuka IIWA | Materiais_ blocos em valchromat